

Background
Urban topographic mapping faces flight permission challenges in certain areas, making ground mobile surveying advantageous due to flexibility and fewer restrictions.
Challenge Identification
We possess ALS data for the expressway and its vicinity but lack comprehensive details on roads, bridges, and tunnels. Photogrammetry and airborne LiDAR for urban topographic mapping are widely used for urban reconstruction but fail to obtain complete 3D information about the city owing to occlusion.
Workflow
We employ multi-platform Cygnus SLAM for 3D urban data collection, supplementing ALS data. Adaptable for handheld, backpack, vehicle, and airborne use. Cygnus SLAM laser scanners enhance mapping of urban structures like viaducts, bridges, roads, and tunnels.
Starting with bridge area survey, two scanning methods (vehicle-mounted and backpack) were selected based on field validation. Backpack scanning captures overpasses and under-bridge areas, while vehicle-based scanning gathers road and tunnel information.
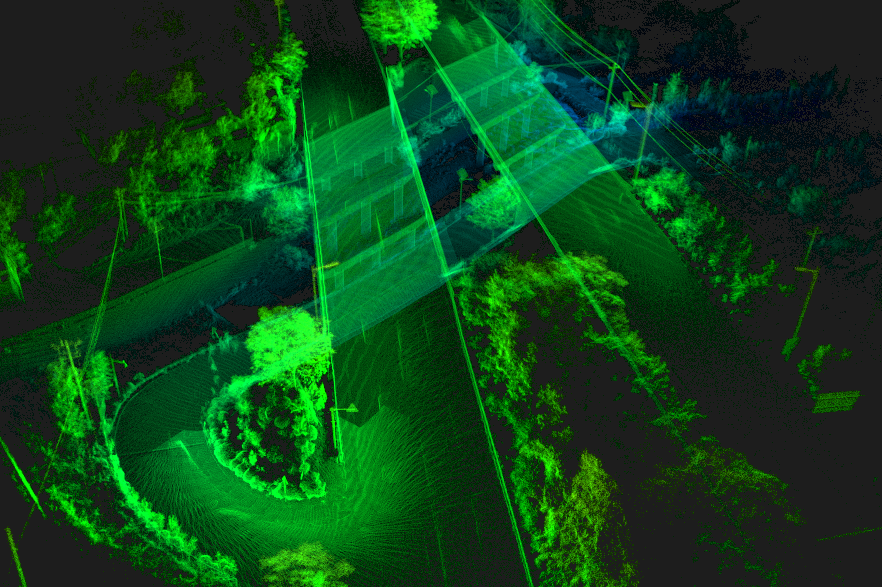
Cygnus Backpack mobile laser scanning system

Utilizing the Cygnus backpack mobile laser system with RTK, we capture the bridge area.
 |
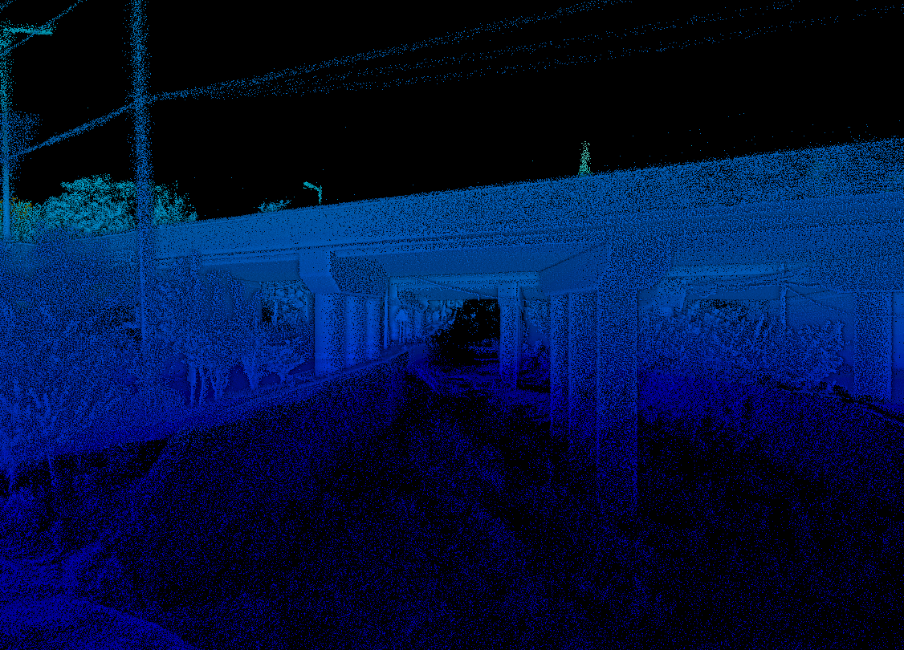 |
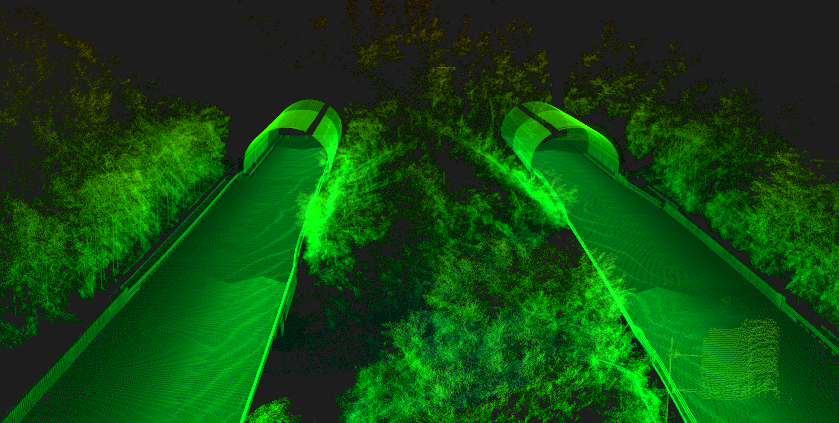
Cygnus car-mounted SLAM scanning system
 |
 |
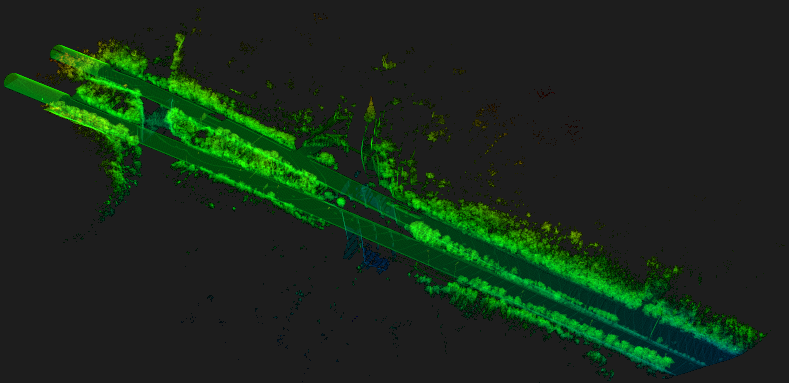
Mounted on a car with RTK, Cygnus SLAM scanners yield enhanced results. Control points are placed for GNSS signal loss, and round-trip scanning ensures a closed-loop trajectory for reliable data. On-board scanning data is depicted in Fig. 6-a, while tunnel entrance point cloud is displayed in Fig. 6-b.
 |
 |
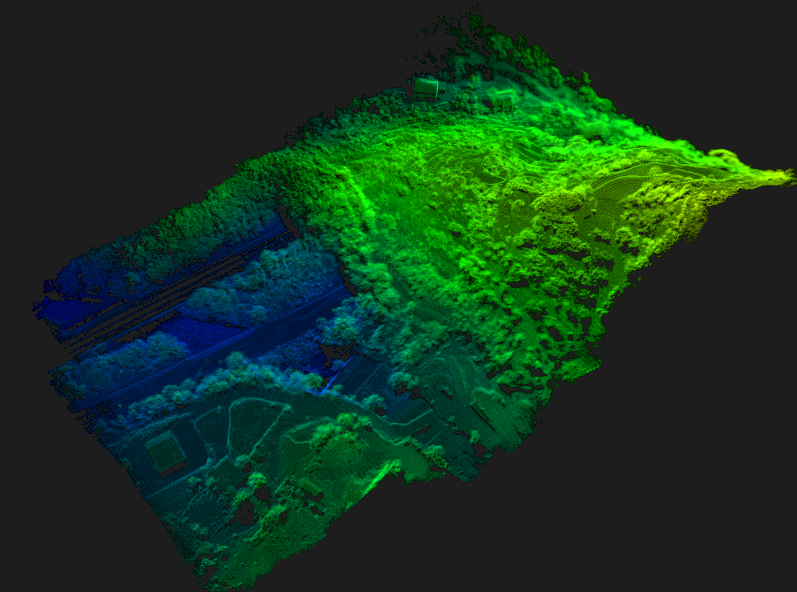
Multi-source point cloud data
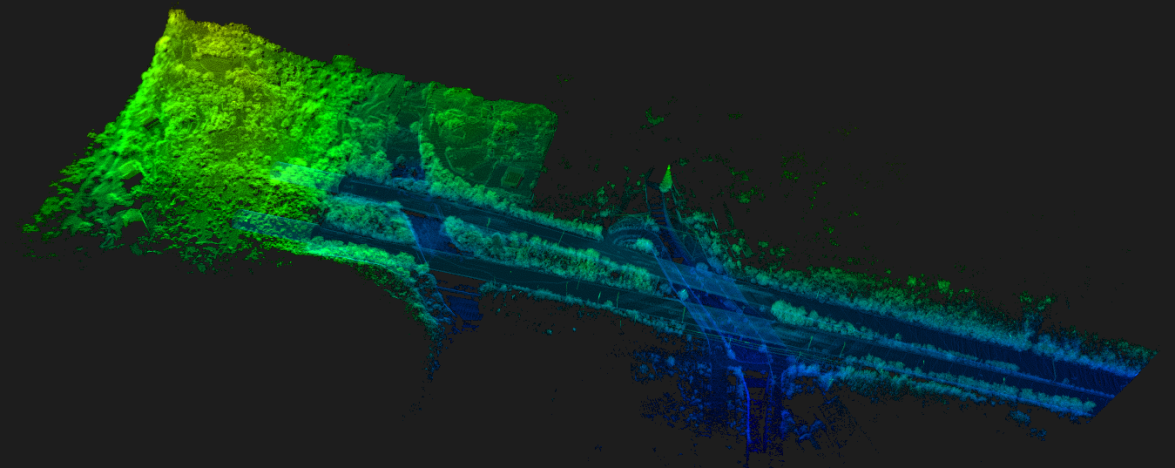
Both data types are automatically integrated using Cygnus's SLAM Manager app, minimizing manual efforts and saving time in production. Point cloud data fusion harmonizes vehicular, backpack, and airborne data into a single coordinate system, exporting as *.las format. This ensures bridge and environment integrity, preventing data gaps. Complete data is illustrated in Fig. 7.
Summary
We leverage SLAM Laser scanner versatility (backpack, vehicle-mounted) for enhanced data collection. Integrating SLAM with aerial remote sensing technologies yields comprehensive urban 3D data.
Contact
SatLab Geosolution i Göteborg AB
www.satlab.com.se info@satlab.com.se
Jarnbrotts Prastvag 2,
421 47 Västra Frölunda,
Göteborg, Sweden